|
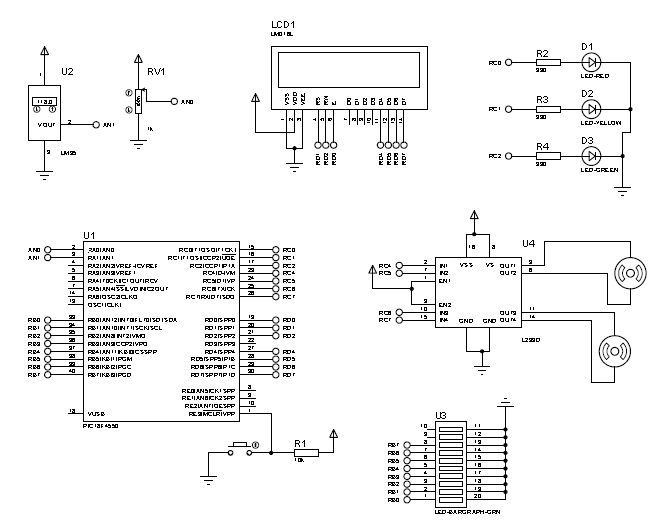
| Schematic Diagram for 4x4 Keypad |
//Keypad Driver: flex_kbd4x4.c
#define row0 PIN_B4
#define row1 PIN_B5
#define row2 PIN_B6
#define row3 PIN_B7
#define col0 PIN_B0
#define col1 PIN_B1
#define col2 PIN_B2
#define col3 PIN_B3
// Keypad layout:
char const KEYS[4][4] =
{{'7','8','9','/'},
{'4','5','6','X'},
{'1','2','3','-'},
{'*','0','=','+'}};
#define KBD_DEBOUNCE_FACTOR 33 // Set this number to apx n/333 where
// n is the number of times you expect
// to call kbd_getc each second
void kbd_init()
{
//set_tris_b(0xF0);
//output_b(0xF0);
port_b_pullups(true);
}
short int ALL_ROWS (void)
{
if(input (row0) & input (row1) & input (row2) & input (row3))
return (0);
else
return (1);
}
char kbd_getc()
{
static byte kbd_call_count;
static short int kbd_down;
static char last_key;
static byte col;
byte kchar;
byte row;
kchar='\0';
if(++kbd_call_count>KBD_DEBOUNCE_FACTOR)
{
switch (col)
{
case 0:
output_low(col0);
output_high(col1);
output_high(col2);
output_high(col3);
break;
case 1:
output_high(col0);
output_low(col1);
output_high(col2);
output_high(col3);
break;
case 2:
output_high(col0);
output_high(col1);
output_low(col2);
output_high(col3);
break;
case 3:
output_high(col0);
output_high(col1);
output_high(col2);
output_low(col3);
break;
}
if(kbd_down)
{
if(!ALL_ROWS())
{
kbd_down=false;
kchar=last_key;
last_key='\0';
}
}
else
{
if(ALL_ROWS())
{
if(!input (row0))
row=0;
else if(!input (row1))
row=1;
else if(!input (row2))
row=2;
else if(!input (row3))
row=3;
last_key =KEYS[row][col];
kbd_down = true;
}
else
{
++col;
if(col==4)
col=0;
}
}
kbd_call_count=0;
}
return(kchar);
}
//**********************************************************
//Main Program
#include <18F4550.h> // PIC18F4550 HEADER FILE
#fuses XT,NOWDT,NOLVP,NOPROTECT // EXTERNAL CLOCK, NO WATCH DOG TIMER, NO LOW VOLTAGE
#device adc=10 // USE 10 BIT ADC QUANTIZATION
#use delay (clock=4M) // 4 MHZ CRYSTAL
#include <flex_lcd420.c>
#include <flex_kbd4x4.c>
//Main Program
void main()
{
char k;
lcd_init();
kbd_init();
lcd_putc("\fReady...\n");
//Pin Configuration
while(true)
{
//Program start here
k=kbd_getc();
if(k!=0)
if(k=='*')
{
lcd_putc('\f');
delay_ms(100);
lcd_putc("\fReady...\n");
}
else
lcd_putc(k);
}
}